
3D SCANNER: Más fotos
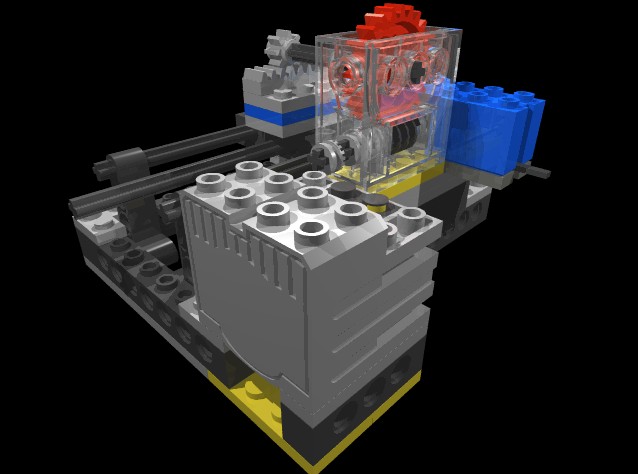
(Tracción de oruga para el movimiento en el eje Y; para esto usé un motor Lego System y una reducción con poleas. La junta se encuentra sobre el centro de masa para mayor equilibrio.)
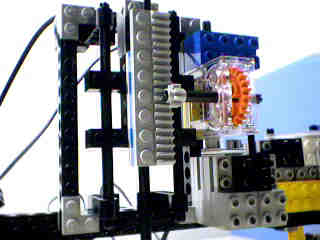
(Eje Z: Reducción mediante tornillo sin fin (worm gear) y cremallera; sensor de rotación para medir las profundidades)

(Eje X: reducción con polea y linealización con cremallera)